

Planetary rovers
For mobile robots driving across natural terrain, it is critical to be endowed with an efficient locomotion system. A four-wheeled conventional independent suspension vehicle appears to keep all wheels equally on the ground, but the wheels that are on the bumps, being lifted, are carrying more weight than the other wheels. This reduces the traction of the lightly loaded wheels. A better solution, at low speeds, is to allow some of the wheels to rise, relative to the chassis, over bumps without changing the weight distribution or changing it as little as possible. This objective can be achieved using a passive articulated suspension.
Research at RML is devoted to investigate the locomotion performance of rocker-type rovers and to develop novel technologies to enhance their degree of driving automation towards fully autonomous robots.
Partner: University of Michigan, Space Robotics Laboratory of the Tohoku University, Sendai, Japan.

Precision Agriculture
Plant phenotyping, that is, the quantitative assessment of plant traits including growth, morphology, physiology, and yield, is a critical aspect towards efficient and effective crop management. Currently, plant phenotyping is a manually intensive and time consuming process, which involves human operators making measurements in the fi eld, based on visual estimates or using hand-held devices. The research at RML aims to develop methods for automated in-field phenotyping using an unmanned rover equipped with a multi-sensor suite.
Partner: CNR-STIMA, Danish Technological Institute, Australian Centre for Field Robotics (ACFR) at University of Sydney.

Innovative Tracked Robots
Tracked vehicle systems allow robots to travel smoothly on various off-road surfaces at a high speed, and can overcome a variety of natural and man-made obstacles. Mobility and ride comfort can be greatly enhanced by adopting an appropriate articulated suspension system. Research at RML aims to investigate innovative solutions through high-fidelity simulation models and field validation.
Partner: Robodyne
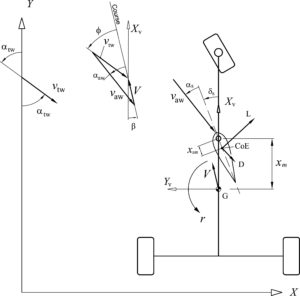
Wind-driven Robots
Wind is an available and green energy source that represents an appealing alternative or a supplement to fossil fuels in sustainable transportation systems. In this research, RML is interested in the concept of land sailing that refers to the motion across ground of a wheeled vehicle that is propelled by wind through the use of a sail. The term comes from analogy with (water) sailing.
Partner: Politecnico di Bari, Università di Padova

Underactuated Robotic Hands
Research in this field is devoted to the study of novel architectures of robotic hand designed for prosthesis purposes. The systems generally draw from the properties of differential mechanisms that can be arranged in cascade via serial or parallel connections to achieve a high degree of underactuation. This solution ensures self-adaptive and force isotropic grasps.
Partner: BionIT Labs